








주요 특징 및 장점
-

 고성능, 고정밀
고성능, 고정밀 -
 이미지 품질이 우수하다
이미지 품질이 우수하다 -
 손 안에 눈/손 바깥에 눈 (선택 가능)
손 안에 눈/손 바깥에 눈 (선택 가능)
제품목록



왼쪽으로 스와이프
| VMD03-1230(C)* | VMD03-8521(C)* | VMD02-5011 | VMD02-4070 | |
|---|---|---|---|---|
| 기술 원리 | 양안 + 줄무늬 구조광 | 양안 + 줄무늬 구조광 | 양안 + 줄무늬 구조광 | 양안 + 줄무늬 구조광 |
| 레이저 파장대 | 635nm(적색광) | 635nm(적색광) | 635nm(적색광) | 635nm(적색광) |
| 광원 | 레이저 | 레이저 | 레이저 | 레이저 |
| 셔터 방식 | Global | Global | Global | Global |
| 도면 출력 지연 시간 | ~1860ms@Standard ~2240ms@Quality ~1680ms@Fast | ~2020ms @ Standard ~2390ms @ Quality ~1719ms @ Fast | ~1950ms @ Standard ~2300ms @ Quality ~1718ms @ Fast | ~1906ms @ Standard ~2297ms @ Quality ~1749ms @ Fast |
| 프레임 속도 @ 해상도 (심도) | up to 1.14FPS @ 2048 x 1536 /1024 x 768 / 512 x 384 | up to 1.14FPS @ 2048 x 1536 /1024 x 768 / 512 x 384 | up to 1.14FPS @ 2048 x 1536 /1024 x 768 / 512 x 384 | 0.20 @ 400mm 0.25 @ 490mm 0.35 @ 700mm |
| 프레임 속도 @ 해상도 (컬러) | 5fps@2560 x 1920@YUYV 7fps@2560 x 1920@CSI BAYER12GBRG 9fps@1920 x 1440@YUYV 15fps@1280 x 960@YUYV 15fps@640 x 480@YUYV | 5fps@2560 x 1920@YUYV 7fps@2560 x 1920@CSI BAYER12GBRG 9fps@1920 x 1440@YUYV 15fps@1280 x 960@YUYV 15fps@640 x 480@YUYV | / | / |
| RGB-D 정렬 | 지지 | 지지 | 지지 | 지지 |
| 출력 이미지 | 딥맵, 컬러맵, 그레이스케일 맵, 포인트 클라우드 | 딥맵, 컬러맵, 그레이스케일 맵, 포인트 클라우드 | 딥맵, 그레이스케일 이미지, 포인트 클라우드 | 딥맵, 그레이스케일 이미지, 포인트 클라우드 |
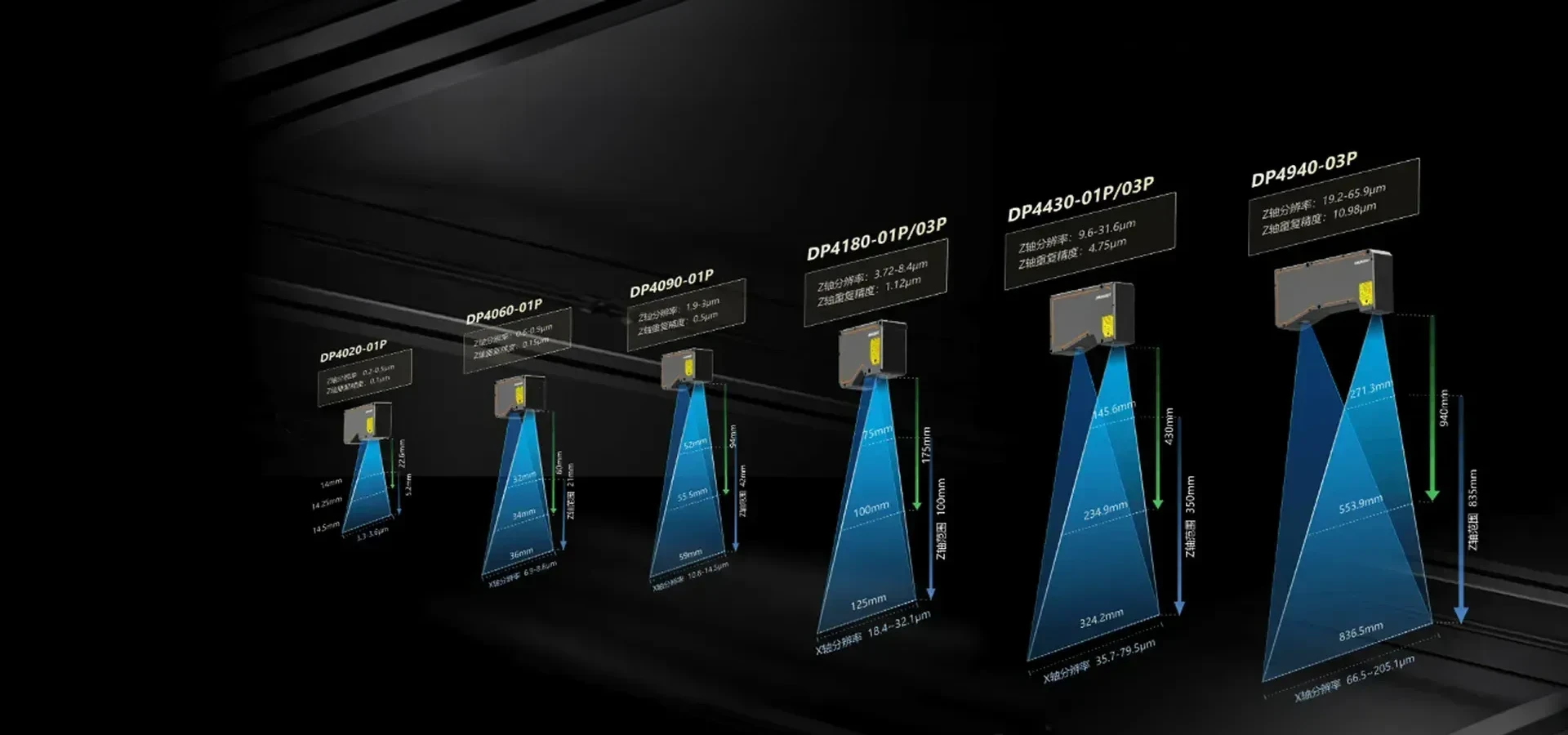
| Z축 정밀도 | 0.08 @ 1200mm 0.59 @ 3000mm | 0.065 @ 850mm 0.08 @ 1190mm 0.21 @ 2100mm | 0.030 @ 500mm 0.055 @ 660mm 0.130 @ 1100mm | 0.018 @ 400mm 0.022 @ 490mm 0.051 @ 700mm |
| XY 축 정밀도 | 0.6 @ 1200mm 1.5 @ 3000mm | 0.43 @ 850mm 0.6 @ 1190mm 1.06 @ 2100mm | 0.25 @ 500mm 0.33 @ 660mm 0.55 @ 1100mm | 0.20 @ 400mm 0.25 @ 490mm 0.35 @ 700mm |
| FOV(H/V) | max 51°/41°±3° | max 51°/41°±3° | max 51°/41°±3° | max 51°/41°±3° |
| 기준선 | 350 | 350 | 180 | 180 |
| 권장 측정 범위 | 1200-2400 | 1000-2000 | 500-1000 | 400 - 700 |
| 최대 측정 거리 | 1200-3000 | 850-2100 | 500-1100 | 400 - 700 |
| 근거리 시야 | 1146 x 906 | 796 x 646 | 482 x 382 | 352 x 307 |
| 원거리 시야 | 2463 x 2243 | 1805 x 1574 | 986 x 831 | 675 x 532 @ 700mm |
| 호스트 운영 체제 | Linux/Windows/ROS | Linux/Windows/ROS | Linux/Windows/ROS | Linux/Windows/ROS |
| 소프트웨어 개발 키트 | Percipio Camport SDK; C, C++, C#, Python 등을 지원합니다. | Vcamera + Camport4 | Vcamera + Camport4 | Vcamera + Camport4 |
| 크기 | 449 mm x 104 mm x 64 mm | 449 mm x 104 mm x 64 mm | 268 mm x 105 mm x 65 mm | 268 mm x 105 mm x 65 m |
| 무게 | 2307g | 2307g | 2080g | 2080g |
| 데이터 인터페이스 | Gigabit Ethernet | 기가비트 이더넷 | 기가비트 이더넷 | 기가비트 이더넷 |
| 네트워크 인터페이스 | M12 X-Code 8孔航空接⼝ | M12 X-Code 8핀 항공 커넥터 | M12 X-Code 8핀 항공 커넥터 | M12 X-Code 8핀 항공 커넥터 |
| 트리거 및 전원 인터페이스 | M12 X-Code 8孔航空接⼝ | M12 X-Code 8핀 항공 커넥터 | M12 X-Code 8핀 항공 커넥터 | M12 X-Code 8핀 항공 커넥터 |
| 전력 소비 | ≤ 24 W | ≤ 24 W | ≤ 24 W | ≤ 24 W |
| 외장 재질 | 알루미늄 합금 | 알루미늄 합금 | 알루미늄 합금 | 알루미늄 합금 |
| 보호 등급 | IP65 | IP65 | IP65 | IP65 |
| 방열 방식 | 수동 냉각 | 수동 냉각 | 수동 냉각 | 수동 냉각 |
| 설치 방법 | 기계적 고정 | 기계적 고정 | 기계적 고정 | 기계적 고정 |
| 공급 전압 | DC 24 V ~ 48 V | DC 24 V ~ 48 V | DC 24 V ~ 48 V | DC 24 V ~ 48 V |
| 작동 온도 | 0 ~ 40℃ | 0 ~ 40℃ | 0 ~ 40℃ | 0 ~ 40℃ |
| 보관 온도 | -10 ℃ ~ 55℃ | -10 ℃ ~ 55 ℃ | -10 ℃ ~ 55℃ | -10 ℃ ~ 55℃ |
|
조명
|
조명
|
조명
|
조명
|
이미지 캡처 지연: 카메라가 소프트웨어 트리거 모드에 있을 때, 호스트에서 소프트웨어 트리거 신호를 전송한 시점부터 카메라에서 심도 이미지를 수신하기까지의 시간 지연. 이 수치는 카메라의 “사용자 설정”이 기본(표준) 상태로 유지된 상태에서 측정된 것으로, 심도 이미지 해상도만 변경한 경우입니다.